









Новоселов Д.Б., главный специалист геодезического отдела
Минхаиров Ф.А., главный геодезист геодезического отдела
ООО «ОК «Сибшахтострой», г. Новокузнецк
Октябрь, 2018 г.
Системы мобильного лазерного сканирования, а также беспилотные летательные аппараты позволяют в кратчайшее время собирать огромные массивы информации о местности – облака точек. На основе этой информации создается цифровая модель местности, которая используется для решения различных инженерных задач.
Целью данной работы является внедрение технологии аэрофотосъёмки местности, осуществляющейся с квадрокоптера, обработки в ПО PhotoScan и КРЕДО для получения топографического плана местности.
Аэрофотосъёмка местности, осуществляемая с беспилотных летательных аппаратов (БЛА), в настоящее время является эффективным решением задач картографирования территории, имеет преимущества перед традиционной наземной съёмкой и в ряде случаев способна заменить ее при создании и обновлении топографических планов крупных масштабов [1]. В качестве БЛА мы использовали квадрокоптер DJI Phantom 4 Pro. Это недорогой БЛА, который способен находится в воздухе около 30 минут и за один полет выполнить съёмку до 25-30 Га.
В качестве объекта внедрения был выбран объект парковка «Центральная» в пгт Шерегеш. На этом объекте с периодичностью проводится традиционная наземная топографическая съёмка, и необходимо было обновить топографический план.
Основные этапы работы на объекте:
- рекогносцировка на объекте;
- установка опознаков;
- определение координат и высот центров опознаков;
- полет квадрокоптера в автоматическом режиме в ПО Pix4Dcapture;
- обработка исходных данных в ПО Agisoft PhotoScan;
- автоматизированная обработка облака точек в КРЕДО 3D СКАН;
- создание топографического плана в ПО КРЕДО ТОПОГРАФ по данным из 3D СКАН, облаку точек и ортофотоплану.
В качестве опознаков была использована отделочная плитка 40х40 см, на ней были нанесены перекрестие, закрашены 2 квадрата в виде шашечек и номер. Такой опознак хорошо видно на фотографиях с высоты от 40 до 70 метров и он устойчив к погодным условиям. Центры опознаков определялись классическим методом с помощью электронного тахеометра методом обратной линейно-угловой засечкой.
Полет квадрокоптера выполнялся в автоматическом режиме, маршрут задавался с помощью ПО Pix4Dcapture для Android (рис. 1). Pix4Dcapture – бесплатное дополнение к ПО Pix4D – позволяет создавать планы полетов, на основе полученных данных предоставляет возможность составлять на ПК или в облаке карты и модели с географической привязкой.
В программе Pix4Dcapture указывается граница участка съёмки, высота полета, скорость полета, % перекрытия снимков, наклон камеры, начало и конец маршрута. Квадрокоптер в автоматическом режиме взлетает, выходит на маршрут, выполняет съёмку и приземляется в месте, откуда взлетел. В случае, когда батарея разряжается во время полета, квадрокоптер автоматически определяет, что он не успеет закончить заданный маршрут, он в автоматическом режиме выполняет посадку в месте взлета.

Рис. 1. Маршрут полета в ПО Pix4Dcapture.
После сбора исходных данных выполняется обработка, на рис. 2 показана схема обработки в ПО PhotoScan и КРЕДО для получения топографического плана.
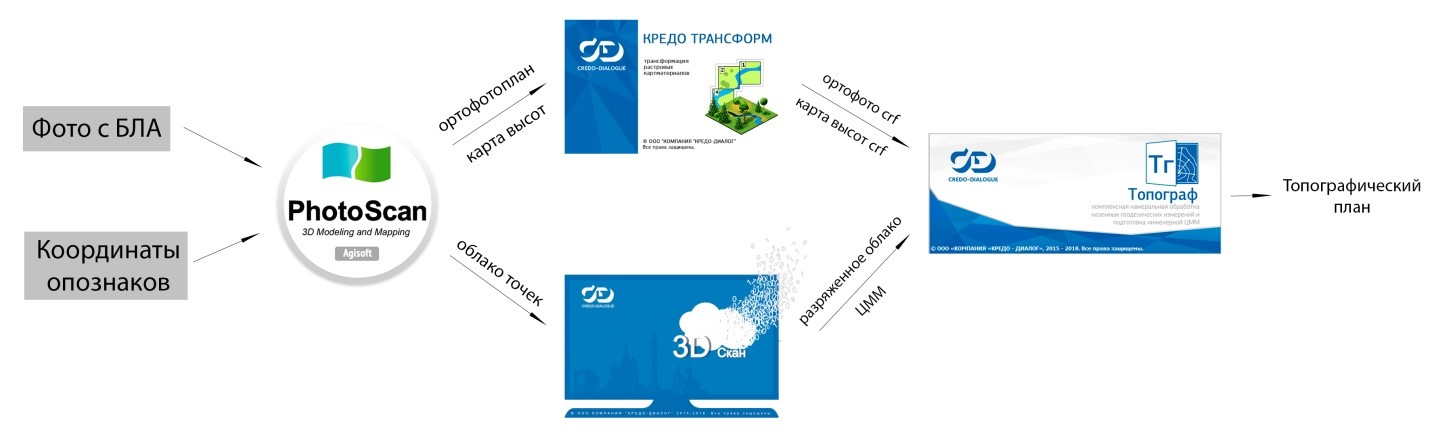
Рис. 2. Схема обработки данных в ПО PhotoScan и КРЕДО.
При обработке данных в ПО Agisoft PhotoScan сначала восстанавливается исходное положение и ориентация камер (по элементам внешней ориентации камер), задается координатная система реконструируемой модели, а затем строится разряженное облако точек на основе фотографий. Для оптимизации результатов расчёта положения камер и параметров их внутренней ориентации выполняется расстановка маркеров, и задаются координаты. Маркеры расставляются по контрольным точкам, тем самым осуществляется контроль точности, заключающийся в вычислении СКО контрольных точек с известными координатами.
Основываясь на рассчитанных положениях камер, программа автоматически вычисляет карты глубин для каждой камеры и формирует плотное облако точек, а на его основе – трехмерную полигональную модель, для которой строится текстура. Для создания ортофотоплана по полигональной модели строится карта высот, на которую проецируется план [2]. Для исследования мы использовали демонстрационную версию программного обеспечения Agisoft PhotoScan.
Перед полетом квадрокоптера на данном объекте были сняты 38 контрольных точек классическим методом для оценки точности полученной модели. Дополнительно были использованы 70 точек на автомобильной дороге, которая была снята раньше классическим методом и не претерпела изменения. Сравнивались отметки точек, полученные из плотного облака точек, методом интерполяции и отметки, измеренные классическим наземным методом с помощью электронного тахеометра. Средняя разница отметок составила 14 мм. В соответствии с инструкцией по топографической съёмке в масштабах 1:5000, 1:2000, 1:1000 и 1:500 средние погрешности съёмки рельефа относительно ближайших точек геодезического обоснования не должны превышать по высоте 1/3 принятой высоты сечения рельефа при углах наклона местности от 2 до 10º или 0,17 м для высоты сечения рельефа 0,5 м. Полученные нами 14 мм не превышают допуск в 17мм, можно сделать вывод о возможности использования цифровой модели рельефа нашего объекта для обновления топографического плана с высотой сечения рельефа 0,5 м.
Затем данные, полученные после обработки фотографий – плотное облако точек, экспортируются в программу КРЕДО 3D СКАН. Данная программа предназначена для создания цифровой модели местности инженерного назначения по данным лазерного сканирования. Также в КРЕДО 3D СКАН можно загружать и обрабатывать данные с БЛА, плотное облако точек, полученное с аэрофотосъёмки – тоже самое, что и облако точек, полученное с лазерного сканера по своей структуре.
На первом этапе осуществляется фильтрация загруженного облака точек. В процессе фильтрации уменьшается плотность точек в облаке, удаляются точки, которые являются «шумом». При необходимости можно удалить часть облака точек или наоборот объединить несколько облаков точек в одно. Программа позволяет в полуавтоматическом режиме создавать цифровую модель рельефа, для этого необходимо выделить рельеф, указав параметры, подходящие для данного типа местности. В результате будет создано облако, содержащее точки, которые относятся только к рельефу местности [3]. Затем необходимо проредить облако точек в зависимости от требований к цифровой модели рельефа и построить модель рельефа (рис. 3).
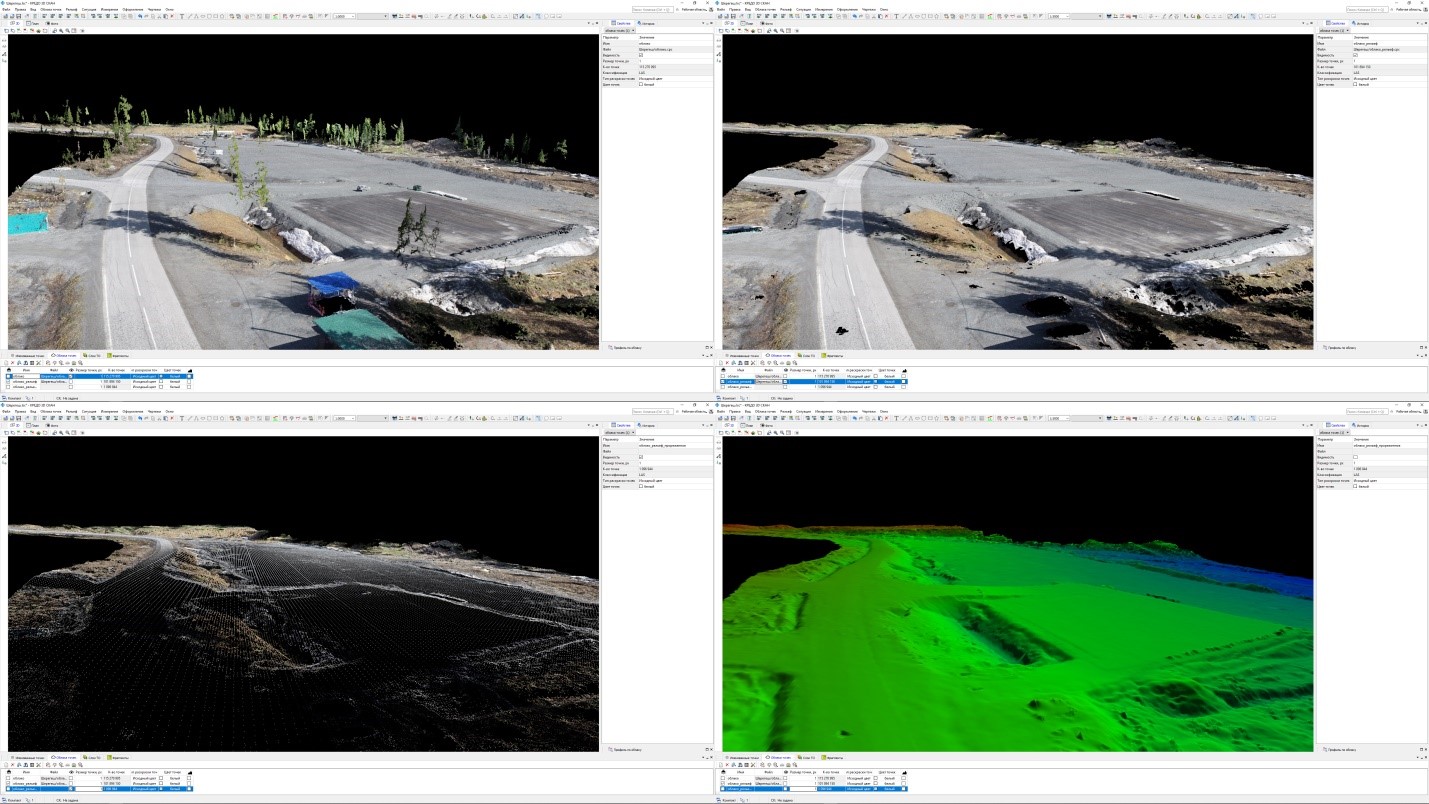
Рис. 3. Работа в программе КРЕДО 3D СКАН
В новой версии программы, которая вышла летом 2018 года, реализована возможность автоматического поиска краёв дорожного полотна, верхних и нижних бровок вдоль дороги (рис. 4). Программа позволяет быстро и эффективно создавать структурные линии по основным элементам дороги. Для верхних бровок вдоль дороги при наличии четкой линии перегиба рельефа структурная линия может быть распознана автоматически. Также возможно автоматическое распознавание бровок на уступах карьеров. Для остальных случаев программа предоставляет удобные инструменты, существенно повышающие скорость работы и качество результата при ручном создании структурных линий. Для четкой визуализации областей с уклоном можно рассчитать раскраску области по градиенту уклона. Матрица высот, созданная по облаку точек, позволяет четко увидеть особенности рельефа в 3D. А динамически перестраиваемый по положения курсора в 2D окне профиль облака даёт возможность при рисовании линии в плане точно позиционировать их в характерных местах перегиба.
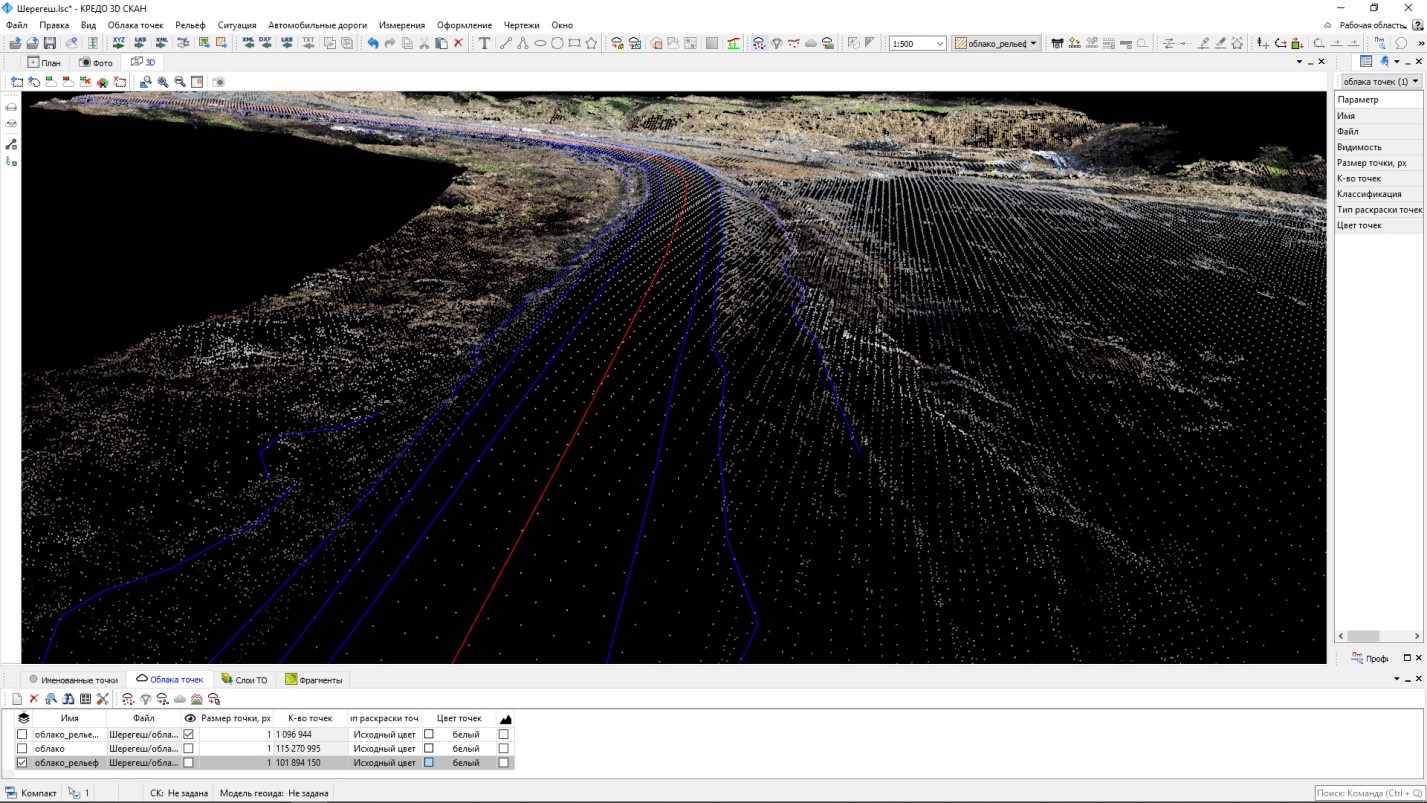
Рис. 4. Распознавание основных элементов дороги.
После обработки данных в ПО КРЕДО 3D СКАН и ТРАНСФОРМ все данные экспортируются в программу КРЕДО ТОПОГРАФ, и в ней выполняется создание топографического плана местности. При работе в программе КРЕДО ТОПОГРАФ используется: рельефное разряженное облако точек, элементы рельефа и дороги, которые автоматически были распознаны в КРЕДО 3D СКАН, высокоточный ортофотоплан и растровое изображение карты высот, на которой очень хорошо просматриваются перепады рельефа. Если возникает какой-то вопрос, можно воспользоваться исходным облаком точек, покрутить необходимую область в 3D и сделать замеры в программе 3D Скан. В результате аэрофотосъёмки мы получаем очень большой объём данных для создания цифровой модели местности.
Основные преимущества аэрофотосъёмки с БПА:
- значительно сокращается время выполнения полевых работ;
- большой объём исходных данных – облако точек и ортофотоплан;
- перспективность технологии для дальнейшего внедрения BIM;
- небольшая стоимость коптера по сравнения с лазерным сканером;
- высокая производительность съёмки рельефа по сравнению с лазерным сканером.
Основные недостатки аэрофотосъёмки с БПА:
- необходимость съёмки высотных отметок ЛЭП, пересечек и обследование колодцев классическим методом;
- меньшая точность определения точек по сравнения со сканером;
- зависимость от погодных условий, для полета необходимо отсутствие осадков и скорость ветра меньше 10 м/с.
Программы PhotoScan и комплекс КРЕДО позволяют автоматизировать процесс обработки аэрофотосъёмки с БПА и создать цифровую модель местности, предназначенную для решения различных прикладных инженерных задач.
Дальнейшее внедрение аэрофотосъёмки с помощью квадрокоптера — мониторинг строительства крупных промышленных объектов, земляные работы, временные автодороги, площадки складирования, выявление грубых геометрических ошибок, расчёт объёма инертный материалов.
Список литературы:
- Оньков И.В., Гормаш А.В. Оценка точности цмр по материалам аэрофотосъёмки с БЛА «Геоскан 101» // Геопрофи. – 2015. — №5. с. 49-51.
- Солощенко Ф.В., Гринько Е.В., Курков М.В., Суздальцев Н.Р. Опыт ГК «Геоскан». Создание высокоточной трехмерной модели тульской области // Геопрофи. – 2018. — №3. с. 13-16.
- Кукареко И.С., Грохольский Д.В. CREDO 3D СКАН – новое решение для обработки данных лазерного сканирования // Геопрофи. – 2016. — №1. с. 41-43.