Преобразование из фотограмметрических и лазерных облаков точек цифровой модели местности (ЦММ) инженерного назначения является трудоемкой рутинной задачей. Автоматизация этого процесса позволяет существенно сократить временные затраты на обработку фотограмметрических и лазерных облаков точек.
ПРОГРАММА КРЕДО 3D СКАН РЕШАЕТ СЛЕДУЮЩИЕ ЗАДАЧИ:
импорт/экспорт облаков точек в форматах: LAS, LAZ, текстовых файлов с настройкой формата, импорт облаков точек в формате E57;
отображение облаков точек в трехмерном виде (3D), на плоскости (2D) и в вертикальных сечениях;
загрузка и отображение репозиционированных фотоизображений в форматах Riegl, Leica Pegasus, АГМ-МС, CHC Alpha 3D, GreenValley, Teledyne Optech, kml, E57 совместно с облаком точек;
трансформация облаков точек по абсолютным и относительным опорным точкам, автоматический поиск сферических марок;
работа с целым облаком, выбранной областью или отдельными его слоями;
измерения по облакам точек в плане, в 3D, в поперечных разрезах;
фильтрация облака точек по порогу различных значений, измеренных или вычисленных;
расчет нормалей для точек облака;
расчет высоты над рельефом для точек облака;
фильтрация различных видов шумов в облаке точек;
выделение (классификация) рельефа;
создание матриц высот по облакам точек;
адаптивное прореживание облака точек и построение цифровой модели рельефа (ЦМР);
сохранение и использование пользовательских параметров алгоритмов и пакетных сценариев обработки облаков точек;
распознавание точечных и линейных объектов ситуации и создание по ним топографических объектов в трехмерном виде (3D), на плоскости (2D), в вертикальных сечениях;
автоматический поиск линий электропередачи (столбы и провода) по облаку точек с последующей интерактивной проверкой результатов;
автоматический поиск дорожных знаков по фотоизображениям с геопространственной привязкой с последующей локализацией положения знаков по облаку точек и интерактивной проверкой результатов;
создание светофоров с динамическими свойствами (дополнительные секции, стрелки) по облаку точек;
возможность автоматического распознавания по облаку точек объектов дорожной инфраструктуры: разметки, бровок и подошв земляного полотна, кромок покрытия, бордюров, столбов дорожных знаков, сигнальных столбиков;
создание растровых изображений по облакам точек;
интерактивное распознавание линейных объектов по растрам, полученным из облаков точек и ортофотопланам;
импорт и визуализация 3D моделей в формате IFC и в популярных форматах. Измерение расстояний между узлами и ребрами 3D моделей и облаками точек, ТО в 3D окне;
импорт и визуализация 3D триангуляционных сеток;
расчет объемов по облакам точек;
создание и редактирование топографических объектов для подготовки топографических планов при выполнении небольших проектов;
создание, редактирование и экспорт в DXF/DWG чертежей сечений облака точек;
экспорт данных цифровой модели местности (ЦММ) или цифровой модели рельефа (ЦМР) в форматах: DXF, DWG, TopoXML (LandXML), MIF/MID и текстовых файлов с настройкой формата;
экспорт элементов организации дорожного движения в формате TopoXML.
ПОДГОТОВКА ИСХОДНЫХ ДАННЫХ
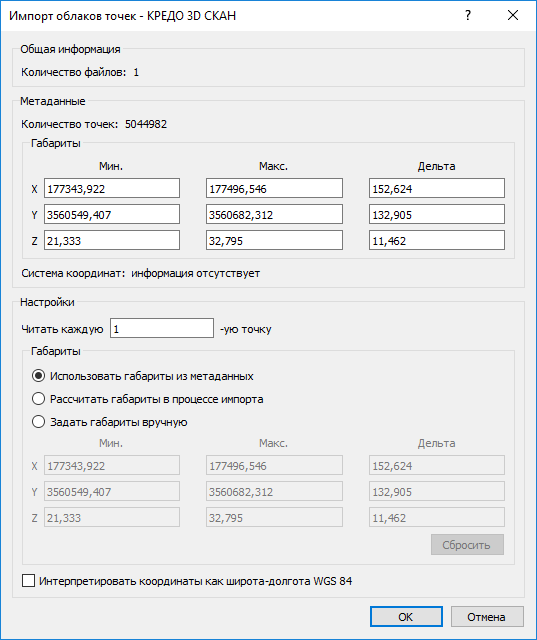
Работа в программе начинается со сбора исходных данных. Информация по облаку точек может быть получена в различных форматах: программой поддерживаются форматы LAS, LAZ, Е57, также возможен импорт облаков точек из текстовых файлов с настройкой формата. Сценарий импорта облаков точек позволяет максимально гибко и удобно просмотреть информацию об импортируемых облаках, исправить ошибки габаритов облака, правильно интерпретировать координаты (рис. 1). Кроме того, можно загружать фотоизображения и панорамы с геопространственной привязкой на область, занимаемую облаком точек. Фотоизображения можно просматривать в отдельном окне (окно фотоизображений полностью синхронизировано с камерой 3D-окна) или в режиме совмещенного просмотра в 3D-окне. При работе в плане и 3D возможен выбор определенной фотографии, для определения характеристик объекта при отрисовке ситуации.
Рис. 1.Импорт облаков точек в системе КРЕДО 3D СКАН.
В программе КРЕДО 3D СКАН поддерживается работа с растровыми картами, планами, аэрофотоснимками в различных форматах (CRF, BMP, TIFF, JPEG, PNG, TMD и т.д.), с веб-картами картографических Интернет-сервисов Google Maps и Bing, также возможно добавление пользовательских файловых серверов (рис. 2).
При необходимости к наложенному изображению картографического сервиса может быть применена дополнительная трансформация для устранения локальной несогласованности глобальной и региональной систем координат.
Рис. 2.Работа с облаком точек, веб-картами, фотоматериалами в системе КРЕДО 3D СКАН.
НАСТРОЙКА ПРОЕКТА. РАБОТА С ОБЛАКОМ ТОЧЕК В ТРЕХМЕРНОМ ВИДЕ. ФИЛЬТРАЦИЯ И КЛАССИФИКАЦИЯ ОБЛАКА ТОЧЕК
Перед импортом данных в программу КРЕДО 3D СКАН можно задать все настройки проекта в режиме одного окна. Доступна настройка параметров классификатора топографических объектов, выбор системы координат, выбор варианта отображения объектов на плоскости и единиц измерения. В программе есть возможность импортировать системы координат из базы данных EPSG, для удобства поиска объектов в базе реализован графический интерфейс (рис. 3).
Рис. 3.Поиск систем координат в базе данных EPSG.
После импорта облако точек отображается в двухмерном виде в окне План, где на плоскости можно оценить загруженные данные. Для удобной работы с трехмерным облаком в окне План есть возможность отображения динамического поперечника, строящего разрез 3D вида (включая облака точек, матрицы высот, отображаемые в 3D объекты). Окно отображает поперечник по нормали к заданной линии под курсором в окне план (рис. 4).
Также поперечник можно построить, явно указав линию сечения в окне План. Текущий поперечник можно заблокировать, что позволяет выполнять измерения, создавать и редактировать точечные и линейные объекты в окне, включая линии, пересекающие поперечник. Возможно распознавание линий по облаку в поперечнике и экспорт полученного чертежа в dxf/dwg. При необходимости можно настроить ширину сечения и вертикальный масштаб. Перемещение положения поперечника происходит интерактивно по положению курсора в окне План или командами перемещения при заблокированном поперечнике (для перемещения настраивается большой и малый шаг). При использовании оси дороги в качестве опорной линии в окне поперечника отображается текущее пикетное положение.
Рис. 4.Динамический поперечник по облаку.
Для полноты восприятия и удобства можно перейти к трехмерному виду в 3D-окне и продолжить работу (рис. 5). Перемещение в 3D-окне выполняется интерактивно по всем направлениям с помощью колеса, правой или левой клавиш мыши. В программе реализовано два полноценных 3D окна, что позволяет удобно работать со сложным объектом, имея возможность видеть его одновременно с разных сторон и в виде сверху (в окне План).
Рис. 5.Работа с облаком точек в 3D-окне.
Прежде чем переходить к решению задач по облаку точек, можно осуществить фильтрацию загруженного облака точек. Фильтрация позволяет убрать шумы ниже рельефа, удалить изолированные точки, движущиеся объекты.
В одном проекте фильтры могут применяться как ко всему облаку точек, так и к частям облака (в заданном контуре, к выделенным точкам, к отдельным классификационным слоям, к точкам, определенным составным логическим и геометрическим условием). При этом указание контура можно выполнять как в 3D-окне, так и в окне План. В качестве контура также можно использовать линейный объект. При запуске фильтров можно включить предпросмотр заданных условий и визуально оценить, к каким именно точкам будет применен фильтр.
Для большинства алгоритмов предусмотрена визуализация параметров и геометрических ограничений, предоставляющая наглядность для редактируемых параметров (рис 6).
Рис. 6.Визуализация параметров.
При необходимости можно вырезать, выделять, удалять части облака точек, просто выделяя области рамкой или контуром в плане или 3D-окне.
Удобным инструментом является модификация точек в кластере – с его помощью можно быстро классифицировать или удалить изолированные группы точек.
Для классификации частей зданий и сооружений программа предоставляет функционал работы с плоскими сегментами. Плоские сегменты создаются в интерактивном режиме по плоским отсканированным участкам (стены, крыши, полы и т.п.). В дальнейшем точки облака можно модифицировать по расстоянию от выбранного плоского сегмента, например, назначить слои точкам облака, относящимся к элементам здания.
Также возможно объединение (сшивка) нескольких облаков точек одного проекта в одно облако точек. К отдельным облакам точек можно применять смещение в плане по осям (dX, dY) или по высоте (dH).
ТРАНСФОРМАЦИЯ ОБЛАКОВ ТОЧЕК
В ряде случаев возникает необходимость трансформации облаков точек: для сшивки сканов с разных станций при обработке данных наземного сканирования, для корректировки облака с учетом марок с известными координатами, для взаимной корректировки двух облаков.
Программа предоставляет функционал по трансформации облаков: импорт и разметка на облаках опорных точек, привязка опорных точек к центрам сферических марок, трансформация отдельных облаков и всех облаков проекта, включая возможность трансформации по относительным точкам привязки – точкам без известных координат, положение которых известно на нескольких облаках. Точки привязки могут создаваться как в окне План, так и в 3D-окнах. Трансформация осуществляется кусочно-линейным методом, что позволяет устранять нелинейные искажения отдельных облаков или выполнять взаимную трансформацию нескольких облаков с учетом возможных невязок положения марок. В программе также реализована функциональность точной финальной трансформации облаков алгоритмом ICP.
ПРЕОБРАЗОВАНИЕ ОБЛАКА ТОЧЕК В ЦИФРОВУЮ МОДЕЛЬ РЕЛЬЕФА (ЦМР)
Программа позволяет в полуавтоматическом режиме создавать цифровую модель рельефа (ЦМР). Для этого необходимо выполнить несколько действий:
Выполнить фильтрацию шумов ниже рельефа.
Выполнить классификацию рельефа. В программе реализовано несколько методов классификации, подходящих для различных облаков точек и типов местности. Возможна как классификация (отнесение рельефных точек к слою рельеф), так и создание нового облака с рельефными точками. Для фотограмметрических облаков точек есть возможность удаления нерельефных объектов, плохо поддающихся автоматической классификации в интерактивном режиме, указывая опорный контур по рельефу по периметру объекта. При необходимости тонкой фильтрации твердых поверхностей (например, проезжей части) можно выполнить дополнительную фильтрацию рельефа для таких участках пороговым фильтром по коэффициенту нерельефности с предпросмотром результата.
Оставшиеся после автоматической классификации артефакты, не относящиеся к рельефу, могут быть устранены вручную (удалением отдельных точек и групп точек). Также можно рассчитать нормали и выполнить фильтрацию по значению уклона, устраняя некорректно классифицированные вертикальные объекты по краям облака или в сложных городских условиях.
Работая с моделью рельефа, можно создать матрицу высот по рельефному облаку точек (по слою рельеф облака точек), при необходимости ее интерполировать. Матрицы высот можно использовать в качестве эффективной модели рельефа или для оценки качества выделенного рельефа.
Провести прореживание полученного облака точек в зависимости от требований к цифровой модели рельефа (максимальное расстояние между точками на плоских участках, минимальный отображаемый размер микроформ рельефа). В результате будет создано облако, содержащее число точек, сопоставимое с числом пикетов при инструментальной топографической съемке.
По прореженным (каркасным) точкам облака построить поверхность. При необходимости, настроить параметры отображения цифровой модели рельефа (шаг горизонталей, подписи и т. п.).
При необходимости можно использовать точки, полученные традиционными видами съемок для анализа качества сканирования и выделения рельефа, корректировки модели. Точки могут быть проимпортированы в модель, при этом они будут отображаться в окне План, в таблице Именованные точки, а также в 3D-окне. Совместный просмотр облака точек и импортированных точек съемки в 3D позволяет быстро и удобно оценить пригодность облака для моделирования рельефа. Импортированные (и созданные в программе) модельные точки используются алгоритмами выделения рельефа в качестве опорных точек, гарантированно являющихся рельефными. При импорте точек учитываются коды и команды полевого кодирования и создаются соответствующие ТО.
Программа позволяет быстро и эффективно создавать структурные линии по бровкам. Для бровок и подошв земляного полотна дороги при наличии четкой линии перегиба рельефа структурная линия может быть распознана автоматически. Также возможно автоматическое распознавание бровок на уступах карьеров. Для остальных случаев программа предоставляет удобные инструменты, существенно повышающие скорость работы и качество результата при ручном создании структурных линий. Для четкой визуализации областей с уклоном можно рассчитать раскраску области по градиенту уклона. Матрица высот, созданная по облаку точек, позволяет четко увидеть особенности рельефа в 3D. А динамически перестраиваемый по положению курсора в Плане поперечник дает возможность при рисовании линий в плане точно позиционировать их в характерные места перегиба.
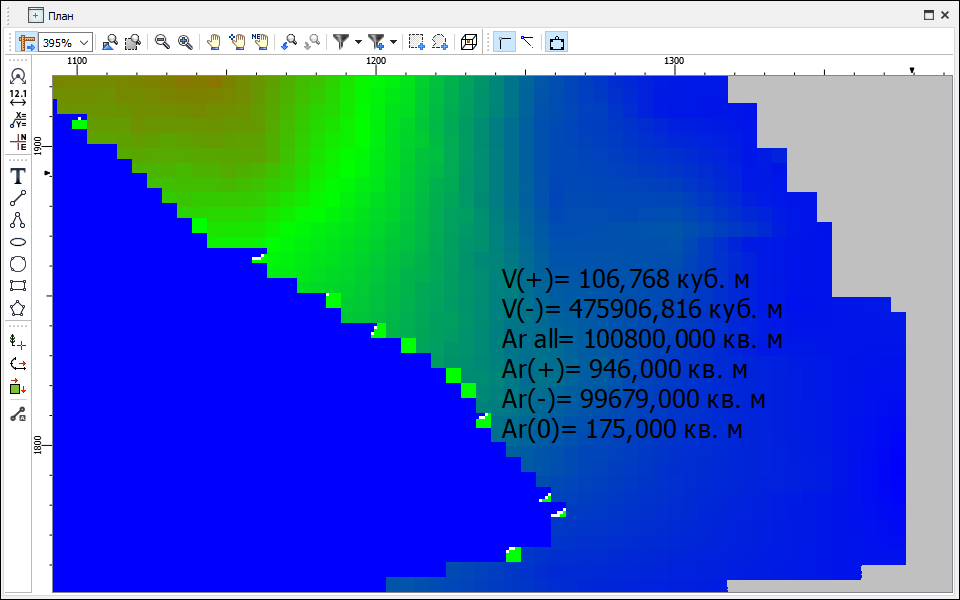
По модели рельефа и рельефным точкам облака программа позволяет выполнить расчет объемов. В качестве модели рельефа выбирается исходное состояние рельефа, облако точек задает конечное состояние. В результате расчета создается подпись со значениями объемов насыпи, выемки и соответствующих площадей, а также растр с картограммой.
Рис. 7.Результат расчета объемов.
СОЗДАНИЕ И РАСПОЗНАВАНИЕ ТОЧЕЧНЫХ И ЛИНЕЙНЫХ ОБЪЕКТОВ СИТУАЦИИ ПО ОБЛАКУ ТОЧЕК
Создание топографических объектов может выполняться вручную как в окне План, так и в 3D-окне. Создание объекта можно производить одновременно в окне План и 3D, продолжая начатую линию в том представлении, в котором отрисовка более удобна. Это существенно упрощает отрисовку сложных линейных и площадных объектов. После выбора в облаке точек объекта ситуации открывается классификатор топографических объектов, в котором выбирается нужный объект. Затем он отображается и в 3D-окне, и в Плане. Объекты, создаваемые в Плане при наличии заданной модели рельефа, получают отметки профиля из модели. В качестве модели рельефа может использоваться облако точек с отфильтрованными нерельефными точками или классификационный слой облака, содержащий рельефные точки, триангуляционная поверхность или матрица высот.
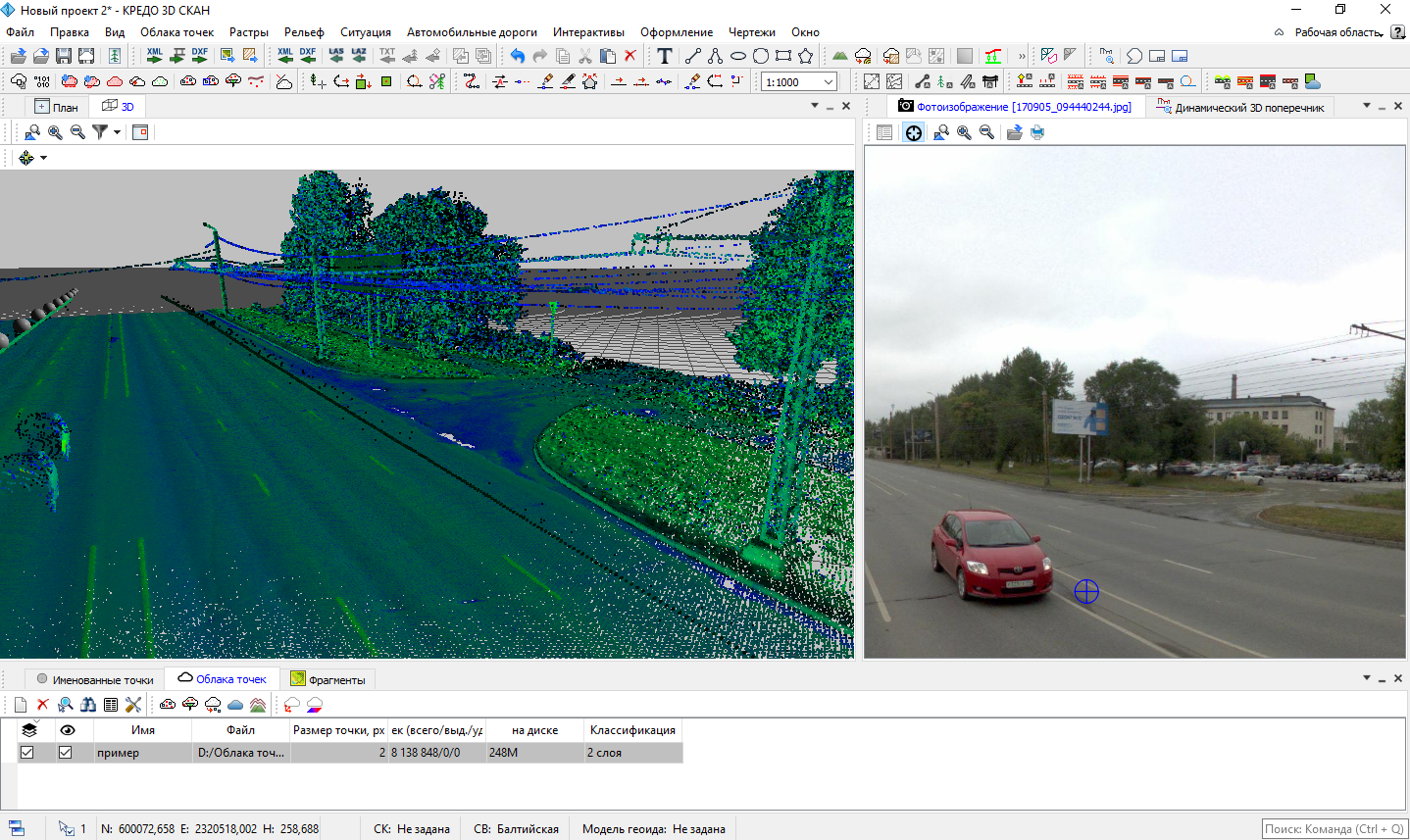
Для удобства работы в 3D-окне можно воспользоваться параллельно открытым окном с фотоизображением, т.е. загрузить привязанное фотоизображение на область, покрывающую облако точек (рис. 8).
Рис. 8.Окно 3D-вида и окно фотографий.
Поскольку фотоизображение имеет геопространственную привязку, облако точек в 3D-окне синхронизировано с ним, что позволяет быстро уточнить характеристики сложных объектов. Возможен как раздельный, так и совмещенный просмотр облака и фотоизображений. Положения центров фотографирования отображаются в окнах План и 3D, что позволяет в ручном режиме переключаться на нужное фотоизображение.
В программе реализован ряд автоматических методов создания цифровой модели местности по облаку точек.
Линии электропередачи могут быть распознаны в автоматическом режиме. На первом этапе осуществляется поиск всех столбов и интерактивная валидация результата, на втором – восстановление геометрии проводов. При этом можно получить, как отдельные провода, так и всю линию одним линейным объектом (рис. 9).
Рис. 9.Распознавание ЛЭП.
Распознавание объектов ситуации возможно, как в 3D-окне, так и в Плане (рис. 10).
Рис. 10.Отображение в окне ПЛАН распознанных топографических объектов.
Для работы в Плане можно «разрезать» облако точек на слои, эквидистантные рельефу. Выделение слоев доступно после расчета высот точек над рельефом. Дальнейшее выделение слоя выполняется интерактивным фильтром по высоте над рельефом с предпросмотром результата. Полученные таким образом слои можно преобразовать в растровые изображения. По растровым изображениям быстро и удобно в интерактивном режиме распознается геометрия линейных объектов. Созданные таким образом линейные объекты получают отметки узлов с модели рельефа, в результате формируются трехмерные линейные и площадные топографические объекты. В программе реализован ряд инструментов обработки растровых изображений, позволяющих выполнить подготовку растров для качественной векторизации. Инструменты позволяют работать как с черно-белыми, так и с цветными растрами. При необходимости отдельные элементы могут быть векторизованы в полуавтоматическом режиме и с цветных ортофотопланов (после предварительной подготовки).
СОЗДАНИЕ И РАСПОЗНАВАНИЕ ЭЛЕМЕНТОВ ДОРОГИ И ОБЪЕКТОВ ОРГАНИЗАЦИИ ДОРОЖНОГО ДВИЖЕНИЯ ПО ОБЛАКУ ТОЧЕК
Программа позволяет выполнять автоматическое распознавание элементов дорожной инфраструктуры: разметки (по данным интенсивности), столбов дорожных знаков, сигнальных столбиков, бровок и подошв земляного полотна, кромок покрытия (при наличии явного перепада высот по отношению к обочине), бордюров. Для максимальной автоматизации процесса распознавания объектов возможен импорт траектории мобильного сканера и расчет по траектории приблизительного положения трассы автомобильной дороги (рис. 11).
Рис. 11.Распознавание элементов дорожной инфраструктуры.
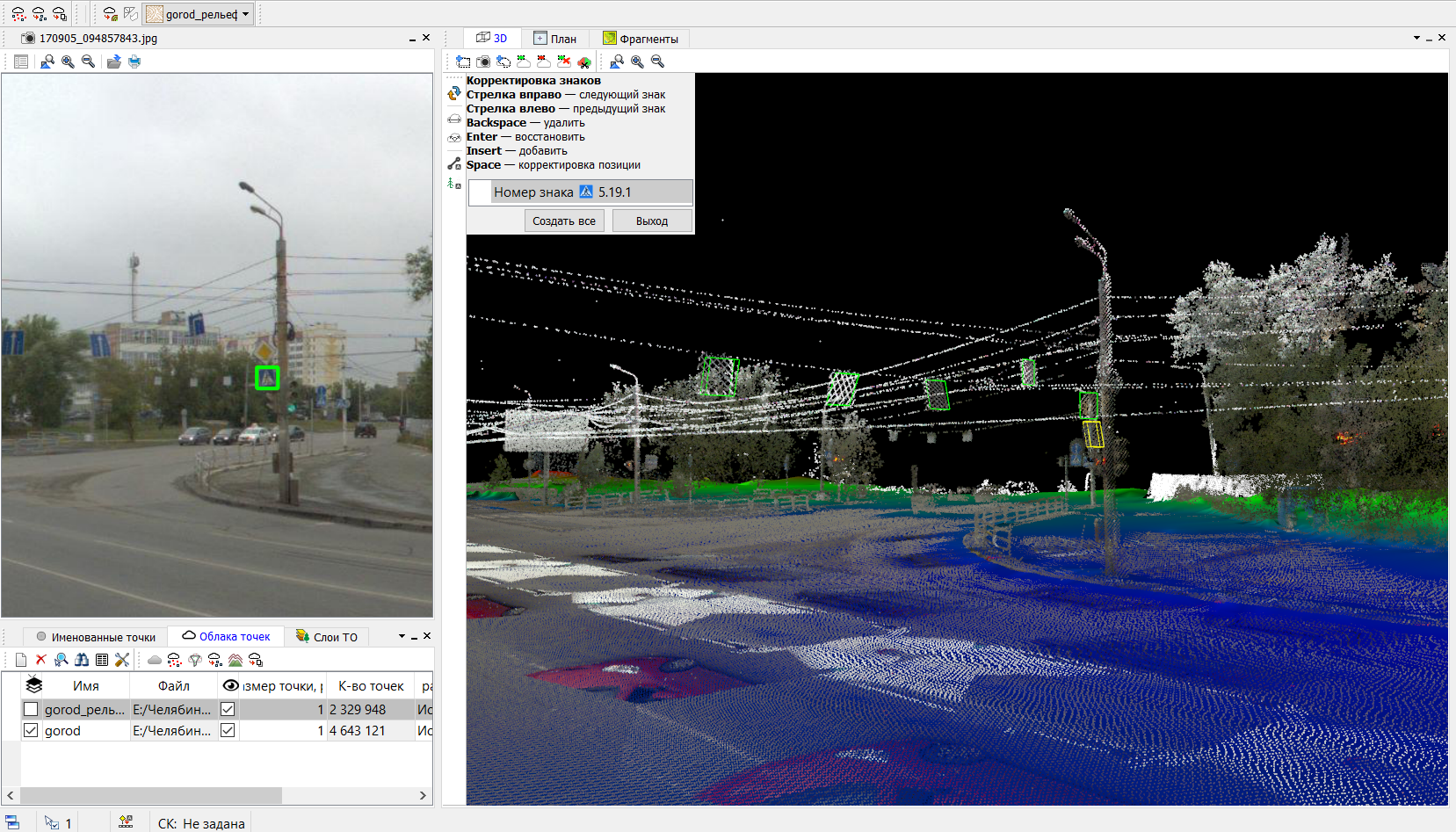
Программа позволяет распознавать и классифицировать по ГОСТ Р 52290-2004 дорожные знаки. Поиск производится по фотоизображениям, полученным ходе сканирования с использованием каскадного детектора. Найденные области проходят классификацию нейронной сетью. Полученные таким образом положения дорожных знаков на фото используются для локализации плоскостей знаков по облаку точек. Весь процесс происходит в автоматическом режиме, по завершении запускается интерактив валидации результатов распознавания знаков с возможностью корректировки класса знака, его положения или добавления пропущенных знаков. Если при выполнении сканирования не было препятствий, создающих «тени» в облаке точек, а фотографирование производилось с частотой около 1 фото на 10 метров траектории, в автоматическом режиме может быть найдено до 100% дорожных знаков. В текущей версии программы распознаются все классы знаков, кроме указателей (5.23.1-5.26, 6.9.1 — 6.21.2) и табличек (8.1.1 — 8.24).
Рис. 12.Распознавание дорожных знаков.
Рис. 13.Создание средств организации дорожного движения.
При необходимости расстановка дорожных знаков по облаку может выполняться и вручную. При наличии привязанных фотоизображений программа будет пытаться найти и классифицировать создаваемый знак по фотоизображению, автоматически выставляя номер знака создаваемому объекту.
В программе возможно решение задач по оценке дороги по материалам лазерного сканирования: расчет индекса ровности IRI с формированием ведомости ровности и графика ровности, а также анализ дефектов (колеи, ямы, состояние обочины) с графической визуализацией (рис. 14). Также возможно выполнить расчет уклонов дорожного полотна по облаку точек с заданным шагом.
Рис. 14.Расчет ровности.
АВТОМАТИЗИРОВАННАЯ ВЕКТОРИЗАЦИЯ УСТУПОВ КАРЬЕРОВ ПО ОБЛАКАМ ТОЧЕК. ВЫДЕЛЕНИЕ ВНЕШНИХ ГРАНИЦ ЗАМКНУТЫХ ПРОСТРАНСТВ
В программе реализована методика автоматизированного поиска линий излома рельефа с созданием векторных структурных линий на них. Поиск выполняется в несколько этапов, на каждом этапе можно оценить полноту и качество работы алгоритма, уточнить параметры для достижения наилучшего результата. (рис. 15).
Финальный этап выделения бровок позволяет интерактивно управлять параметрами и видеть в режиме предпросмотра получаемый на основе текущего значения параметров результат.
При необходимости полученные бровки можно отфильтровать по длине, удалив незначительные элементы и шумы, а также выполнить автоматическую сшивку однотипных элементов.
Рис. 15.Распознавание бровок уступов карьера.
Программа позволяет выполнить классификацию точек внешних границ замкнутых пространств (подземные горные выработки, помещения). В результате работы функции облако точек классифицируется на точки границ пространства и внутренние точки (шум, технологическое оборудование, люди, предметы).
СОЗДАНИЕ СХЕМ И АННОТИРОВАНИЕ ОБЛАКОВ
Программа позволяет создавать подписи объектов в плане и 3D с привязкой к объектам и точкам облака. Механизм подписей разработан максимально гибко, с возможностью настройки шаблонов и создания произвольных пользовательских подписей. Часто используемые подписи могут быть сохранены как шаблоны и использоваться повторно. Для подписей доступно множество параметров: координаты, расстояния и превышения, разности координат, характеристики элементов модели.
Рис. 16.Подписи в 3D-окне.
РАБОТА С 3D-МОДЕЛЯМИ
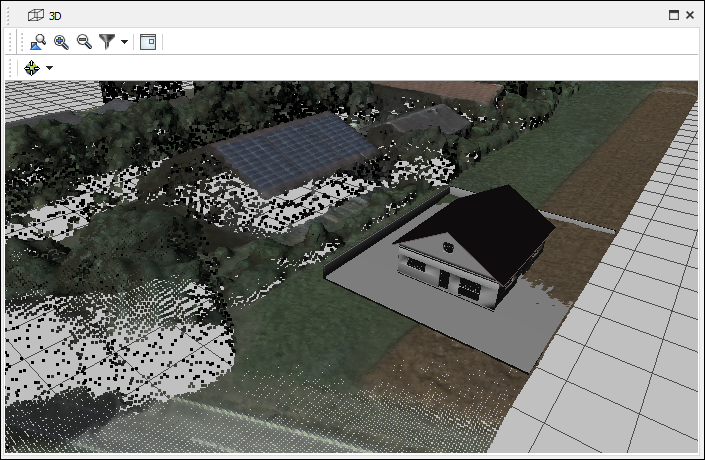
Программа 3D СКАН обеспечивает базовую функциональность с 3D-моделями. Поддерживается импорт как BIM-моделей в формате Industry Foundation Classes (IFC), так и в популярных 3D-форматах. Программа позволяет импортировать и визуализировать модели в 3D-окне совместно с облаками точек, перемещать и масштабировать 3D-модель, выполнять измерения между облаками точек и узлами модели.
Рис. 17. Совместная работа с облаками точек и 3D моделями.
СОЗДАНИЕ ЧЕРТЕЖЕЙ, ЭКСПОРТ ДАННЫХ
Неотъемлемой частью работы на любом объекте является подготовка чертежей. Они могут потребоваться как в виде отчетных документов, так и для решения других задач. Выбирается область, покрываемая чертежом произвольной конфигурации или с заданным размером листа. После этого чертеж отправляется на печать или сохраняется в файле нужного формата.
Результаты обработки данных облаков точек можно экспортировать в файлы следующих форматов: DXF, MIF/MID, LAS, LAZ, TopoXML (LandXML), а также различных растровых форматах.
ПРЕИМУЩЕСТВА ОБРАБОТКИ ДАННЫХ ЛАЗЕРНОГО СКАНИРОВАНИИ В КРЕДО 3D СКАН
Программа КРЕДО 3D СКАН позволяет автоматизировать процесс обработки данных фотограмметрических и лазерных облаков точек для создания цифровой модели местности: модель рельефа и ситуации, предназначенные для решения различных прикладных инженерных задач, а также решения задач по оценке дороги и создания модели дорожной инфраструктуры и средств организации дорожного движения.
Удобный интерфейс программы КРЕДО 3D СКАН, с возможностью автоматизации процессов обработки облаков точек и моделирования обеспечивает максимальную производительность и качество конечного результата.
КРЕДО 3D СКАН входит в состав геодезического направления комплекса КРЕДО. За счет совместной обработки данных инженерно-геодезических изысканий в единой информационной среде, полученных различными методами, вы обеспечиваете себе максимальную производительность и качество.
Заказать обратный звонок
Пожалуйста, оставьте контактные данные. Менеджер свяжется с Вами в течение 10 минут.